Eurobot 2009
Comme tous les ans juste avant l’été, l’équipe du club robot de l’ESEO transmet les clefs du local. Cette fameuse coupe de France de robotique… Elle fait rêver les bidouilleurs depuis bientôt 20 ans, enfin notre tour !
Pour la plupart nous connaissons bien le folklore qui entoure la compétition, je suppose qu’il date de la “spéciale robotique” d’E=M6, quand l’ingéniosité réunissait plus de téléspectateurs que la cellulite. C’est assez difficile de trouver une vidéo de bonne qualité, c’est probablement illégal de la diffuser, mais ça envoyait du pâté :
Bien que la coupe soit devenue plus confidentielle depuis le départ d’M6, elle compte toujours plus de participants, et les anciens se chargent à merveille de transmettre l’esprit et le prestige de l’évènement. Plusieurs pays organisent une coupe nationale pour sélectionner les trois équipes qui les représenteront au niveau européen. La coupe de France est la plus ancienne, et de loin la plus disputée.
Cette année, près de 200 équipes auront huit mois pour construire les robots qui se confronteront sur un jeu concocté par Planète Science. Le sujet sera dévoilé en octobre, nous avons l’été pour monter et former l’équipe. Comme le club se renouvelle presque entièrement tous les ans, c’est une période extrêmement importante. L’idée est de faire participer tous les étudiants motivés, une quarantaine de personnes tout de même !
Nous n’avons jamais géré une équipe de cette importance, jamais réalisé un projet de cette ampleur, jamais touché un robot… Commençons par charger ces responsabilités sur quelqu’un qui saura nous guider, nous motiver, et acceptera d’oublier toute vie sociale, Djoman :) Les autres postes et équipes sont ensuite répartis par compétences, motivations et affinités. Mécanique, propulsion, stratégie bien sûr, mais aussi recherche de sponsors, communication, logistique pour la coupe, fabrication du terrain, etc.
Évidemment, nous ne partons pas de zéro, il est maintenant crucial d’écouter les conseils des anciens et de profiter de leur présence pour se familiariser avec leur robot. Codes informatiques, cartes électroniques, documentations, astuces et traditions sont ainsi transmises depuis 1995.
4 octobre, le sujet est enfin dévoilé : Temples Atlantes, le robot qui bâtira les colonnes et les temples les plus hauts sera déclaré vainqueur !
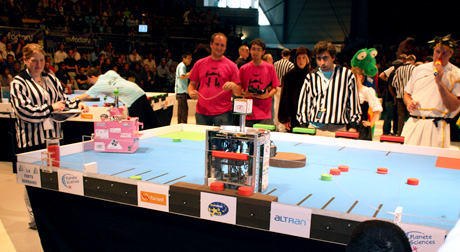
Comme d’habitude, deux robots autonomes s’affrontent pendant 1 min 30 s sur un terrain de 2 m × 3 m. Cette année, il faudra construire des temples à l’aide d’éléments de construction. Chaque robot disposera de 3 linteaux et 16 palets disposés aléatoirement sur le sol et dans des distributeurs. Pour être valide, un temple doit être construit sur une zone marron, il est interdit de détruire les constructions adverses. Tous les détails sur les règles et le comptage des points sont dans le “règlement officiel”:/wiki/eurobot2009/files/E2009_rules_and_drawings-FR-fr-final-v1.pdf.
Et voilà retour à la vie normale dans huit mois ! Les étudiants, anciens, et professeurs de l’ESEO sont conviés à deux brainstormings pour déterminer les stratégies et solutions techniques possibles. C’est aussi l’occasion de présenter le sujet et faire découvrir le club à ceux qui nous succéderont. Premier choix fixé, notre robot s’appellera Archi’tech ! On se donne 3 mois pour s’accorder sur les solutions techniques, puis concevoir la mécanique et l’électronique. L’objectif est de pouvoir commencer la fabrication des circuits imprimés et de la base roulante pendant les vacances de Noël.
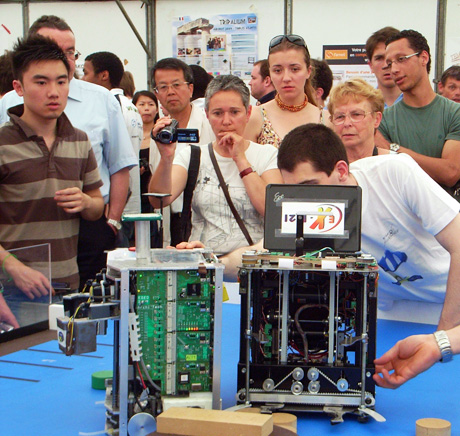
Pour la partie électronique nous avons choisi de garder l’architecture qui est utilisée au club depuis quelques années. Il y aura plusieurs cartes, chacune ayant un rôle précis :
- La carte propulsion aka “Asser.”, qui contrôle les moteurs des roues et gère les déplacements du robot.
- Une ou plusieurs cartes actionneurs, qui commandent les systèmes mécaniques.
- La carte stratégie aka “P.”, qui envoie des ordres aux autres cartes en fonction de la stratégie choisie et de la situation (position du robot adverse, éléments de jeu en possession, etc.).
- La carte supervision aka “Super.”, qui permet de sélectionner la stratégie, elle affiche également le niveau de batterie et les messages qui transitent entre les cartes.
- La carte alimentation, qui génère les différentes tensions à partir de la batterie ou du secteur. Elle est accompagnée de plusieurs cartes de puissance qui alimentent les moteurs à partir de la commande des microcontrôleurs.
- Un ou plusieurs “fonds de panier” pour interconnecter le tout.
Les cartes à microcontrôleur utiliseront des dsPIC30F6010, et communiqueront avec les autres par un bus CAN. Cette année nous avons choisi d’apporter une nouveauté, en standardisant la taille et la connectique de ces cartes.
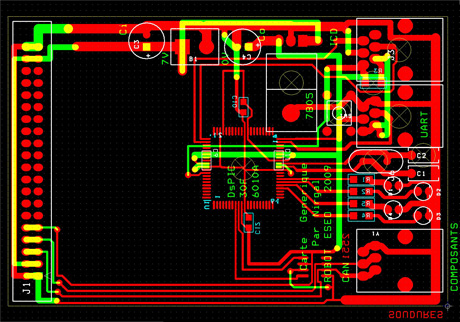
Ceux qui routeront les cartes à micro devront tous partir de ce modèle, créé par Sam’, responsable qualité. L’objectif est que n’importe qui puisse programmer et brancher chaque carte sans avoir à regarder les schémas. Pratique pendant l’année, et indispensable pour les corrections de dernière minute durant la coupe. Tous les connecteurs ont maintenant des détrompeurs et respectent un code couleur. Du joli travail profitera au club pour plusieurs années ! Les circuits seront gracieusement imprimés par ELCO PCB.
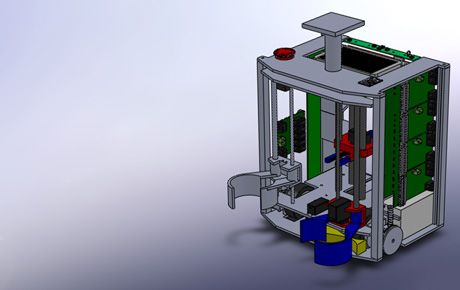
Pour la partie mécanique nous optons pour des systèmes assez simples. Deux pinces montées sur ascenseurs à l’avant, un doigt pour sortir les palets des distributeurs, et une sorte de chariot élévateur à l’arrière pour manipuler et stocker les linteaux. On prévoit également une colonne de capteurs de distance pour détecter les temples adverses. La propulsion des années précédentes est récupérable telle-qu’elle, les axes et courroies des ascenseurs proviendront de vielles imprimantes. Nous n’avons pas de partenaire en mécanique cette année, on fera donc usiner la base roulante et le toit en aluminium, tout le reste sera découpé à la main.
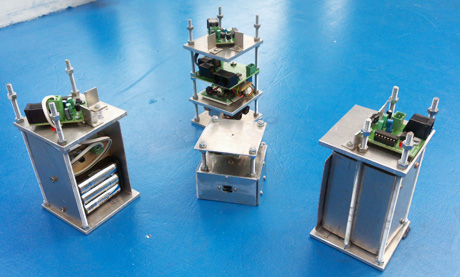
Deux mois plus tard, Architech commence à construire ses premiers temples !
Il nous reste à régler les jeux mécaniques, les problèmes de CEM, compenser les erreurs d’odométrie, détecter les palets au sol, éviter l’adversaire, faire marcher les balises, puis établir une stratégie en fonction de ce qui fonctionne. Si l’on considère les cours, examens, et projets de fin d’année, les trois mois restants s’annoncent plutôt sportifs.
Les balises, qui servent à localiser l’adversaire. C’est la partie la plus facile à transférer d’une année à l’autre, pourtant on n’a toujours pas trouvé de solution fiable. À chaque fois tout fonctionne au club, mais pas à la coupe. Les projecteurs éblouissent capteurs infrarouges et caméras, les tribunes perturbent les ultrasons, la température dérègle les lasers, sans oublier la forte pollution électromagnétique ambiante. Pour compliquer le tout, il ne faut pas que le système soit gêné par les balises adverses, quelles qu’elles soient. Cette année nous avons opté pour un système à LED infrarouge et miroir pivotant, en espérant qu’il soit assez fiable pour être réutilisé par nos successeurs…
Comme chaque année, la Belgique invite quelques équipes étrangères à participer à sa coupe, qui se déroule un mois avant la coupe de France. L’ESEO est souvent de la partie, une occasion de tester son robot en conditions réelles, et de salir la moquette d’un Formule 1.


Architech a passé la plupart du temps en réparation dans les stands, mais il a pu s’homologuer pour participer.
Enfin la grosse claque du séjour, c’était Microb Technology. Des habitués de la coupe de France, eux aussi invités en Belgique. Leur robot équipé de ventouses était déjà “très, très rapide”:http://vimeo.com/23944745. Nous ne le savions pas encore, mais ils remporteront la coupe de France, puis la coupe d’Europe.

Les dernières semaines passent évidemment à une vitesse folle, nous voilà déjà partis pour la coupe de France. Je vous laisse devant quelques photos et vidéos en attendant d’écrire la suite… Sachez simplement qu’Architech a terminé 25e, et que nous aurions fait beaucoup mieux avec quelques heures de plus, certain :p






Crédits
Les nombreux bénévoles de Planète Sciences qui organisent la coupe. Les anciens. L'équipe 2009 :- Président
- Joachim Beaslas
- VP. Adminitration
- Alexandra Giret
- VP. Technique
- Chistian Dreher
- Secrétaire
- Pierre-Antoine Garcia
- Trésorier
- Yves Maupiler
- Logistique
- Marjorie Ponzo-Pascal, Isidore Bell-Bell
- Partenariat
- Alexandra Giret, Marjorie Ponzo-Pascal, Isidore Bell-Bell,
Sylvain Alliez, Thomas Moesse - Communication
- Charles-Édouard Genuist, Simon Joubert, Jérémie Jousse
- Web
- Adrien Grassein, Joachim Beaslas
- Responsable qualité
- Samuel Poiraud
- Modélisation mécanique
- Cyril Lugan, Emmanuel Sichet, Sébastien Migot, Maxime Guillard, Jérémie Jousse
- Mécanique robot et terrain
- Quentin Ancieux de Faveaux, Emmanuel Sichet, Romain Avonde, Romain Porcher, Charles-Édouard Genuist, Arnaud Aunmont, Yves Maupiler, Nicolas Michel, Sylvain Alliez, Damien Duval, Charles-Antoine de Clerville, Adrien de Bouillons
- Carte stratégie
- Christian Dreher, Cyril Lugan, Adrien Lemaitre, Jérémie Jousse
- Carte actionneurs
- Quentin Aebisher, Samuel Poiraud, Guillaume Marion, Sylvain Alliez, Gwennaël Arbona, Maxime Guillard, Matthieu Dupré
- Carte supervision
- Charles-Antoine de Clerville, Simon Joubert, Jérémie Jousse
- Carte propulsion
- Laurent Faucheux, Joachim Beaslas, Pierre-Antoine Garcia, Alexandra Giret, Thomas Moesse
- Simulation
- Aurélie Ottavi, Céline Vérité, Damien Duval, Gwennaël Arbona
- R&D
- Arnaud Aumont, Emmanuel Fradin, Georges Andrew Lanoë, Adrien grassein, Pierre Langlet
